
 欢迎访问四川蓉诺科技有限公司的网站
欢迎访问四川蓉诺科技有限公司的网站

- 公司名称:四川蓉诺科技有限公司
- 联系人:戴德康
- 手机:13330948872
- 公司地址:四川省成都市新都区新都镇金泰路201号
搬运机器人

- 产品名称:全自动搬运机器人管理系统_整理搬运机器人供应商_四川蓉诺科技有限公司
- 产品价格:面议
- 产品数量:1
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2023-02-17
产品说明
AGV 属于一种无人驾驶且拥有搬运功能的自动导航装置,其能够依据预设好的程序,并依照车载传感器给定的位置信息,沿着规划好的路线自动进行移动与停靠,已被广泛应用到许多生产物流场合以及具备自动化功能的立体仓库货库的自动搬运中。
近年来,随着经济快速发展,人们生活需求也越来越多,传统的物流搬运已经不能满足人们需求。并且传统的物流搬运需要花费大量人力,很多物流行业在前期因要花费大量人力与时间而难以发展起来。将装有 AGV 的物流搬运机器人运用到物流行业中,可以减少物流业人力与时间的消耗,减少物流业发展压力。
物流业只需将物流搬运机器人布置好,后期定期检查搬运机器人,几乎完全解放了人力,这种工作方式不仅能减少物流业的消耗,而且能够适应当代行业发展潮流。
AGV 的组成包括内部车身、步行控制系统、通讯系统和声光报警系统等。AGV 的车身是 AGV 的物理主体部分,全自动搬运机器人管理系统_全自动搬运机器人工作原理_四川蓉诺科技有限公司,由车架和相应的机械装置所组成,是其他总成部件的安装基础。当 AGV 小车在行驶中或在加速和减速期间,框架必须满足所需的刚度和强度要求, 且在达到刚度和强度要求后,需要较大的空间装配 LCD 屏幕电源插头、电气产品的控制设备、顶部运输设备和组件等。
揭秘激光焊接生产流程_激光焊接机械零件_四川蓉诺科技有限公司
AGV 步行控制系统是直接驱动执行系统中的主设备, 借助这种控制装置可以根据更多用户的市场需求正常驱动 AGV, 并可以随时制动。通讯系统用于实现 AGV 与地面控制站及地面监控设备之间的信息交换, 通讯系统通常有两种模式可供选择:连续通讯和漂移通讯。
目前,成熟的制导方法是脉冲激光路径导航。激光束地图导航的基本原理是:在工作现场固定由材料制成的具有高反射率的指示牌, 然后在 AGV 上安装脉冲激光直接扫描仪,再扫描脉冲激光。受到标记光反射的周围激光束的引导, 通过钻石的基本原理计算 AGV 的方位角与实际情况之间的距离,全自动搬运机器人管理系统_整理搬运机器人厂家联系方式_四川蓉诺科技有限公司,可以计算出 AGV 车辆的位置,全局建立坐标系中的车身坐标位置,以实现 AGV 的导引。它不需要像磁带路线导航那样在地面上铺设设施。
脉冲激光导航地图算法的实现已经非常成熟,这种 GPS 导航方法仍被更广泛地使用, 并且 AGV也被各种手机制造商所追求。如今随科技的发展,这种导航方式也越来越普及。若物流搬运机器人 AGV 系统运用这种导航方式,能够准确的定位,将货物准确的搬运至指定目的地, 且能大概率减少机器人发生碰撞情况的发生,能够大幅提高物流搬运效率。

揭秘自动喷涂操作流程_设计自动喷涂使用流程_四川蓉诺科技有限公司
在胶带式手机导航中,胶带管道铺设在道路上,而在发电机路线导航中, 电线准备预先埋在地下室中。相反,电磁地图导航方法具有较高的灵活性,并且可以更轻松更改地图导航。这种导航地图方法由于盒式磁带被放置在地面上,因此很容易损坏或弄脏。这种方法也容易受到外部不确定性影响。由于磁带导航地图方法对环境有非常严格的要求, 必须将环境附着在地面上以具有更好的基本条件。这种导航方式相对于其他方式来说布置较简单,全自动搬运机器人管理系统_智能搬运机器人厂家联系方式_四川蓉诺科技有限公司,也是很多物流行业所选择的导航方式。
视觉感知 GPS 导航的工作原理是:使用 CCD 后编辑机快速获取 AGV 驾驶车辆图像信息的内容, 然后获取包括计算机视觉感知的实时数据,进行处理以定位 AGV,在一个方向上驾驶车辆,这种路线导航方法有两种:固定路线方法和自由路线方法。可以固定改变方式。
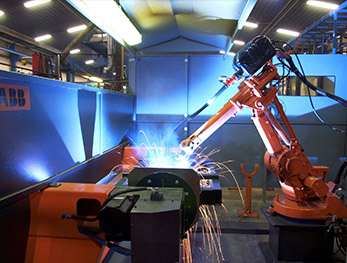
搬运机器人是一种可以进行自动化搬运作业的工业机器人。其被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。由于部分工业领域的搬运限度已超过人工搬运的极限,搬运机器人可以从根本上解决这种难题。
记录自动焊机机械零件_管道自动焊机操作知识点_四川蓉诺科技有限公司
另外,搬运机器人可安装不同的末端执行器以完成各种搬运工作,这样可以省去很多人力,现代科技所研发制造的工业机器人在工业生产中能代替人类去做单调、频繁和重复的机械性长时间作业,来减轻人类的负担,而且工业机器人通过编程使得其操作精度以及劳动强度也大大地超越了人类,能满足人工所不能满足的工作。
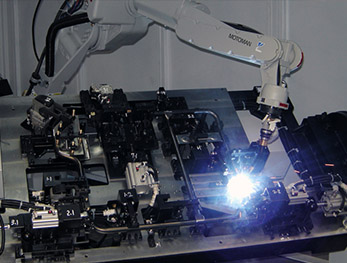
现在随着机器人搬运应用的场景越来越复杂,很多搬运机器人系统都开始配备了视觉识别系统。视觉识别系统一般会在工件上方竖立2D/3D摄像机对工件进行拍照识别,也有一些视觉系统会直接集成在机器人末端执行器上,以满足分拣、装配、乱序抓取等生产场景的需求。
一般而言,CCD 安装在 AGV 车身的前方, 视线在 AGV 前方的道路上。同时,AGV 有一条导航标记线,可以在车辆领域进行识别。AGV 可以根据捕获的手机导航标记图像数据实时准确识别 GPS 导航线,并自动弯曲车辆的基本行驶路径。如果 AGV 系统中存在相对较好且持续有效的机器学习算法, 则 AGV 可能难以自动识别有关其实现路径的各种信息。
如今,许多研究机构和高校也在通过从多个角度捕获图像数据来研究具有多个 CCD 摄像机的 AGV 系统。通过计算机视觉感官的主要原理来合成静态图像的三维信息内容,不仅可以看到周围的事物,还可以测量 AGV 对象的形状和物体的距离。随着 CCD 摄像机和微型处理器的发展,电子计算机视觉感知制导方法以其较低的市场价格、更高的精度和更大的灵活性而受到越来越多的关注。
供应商信息



